Operating and Controls
Controller Map

# This file defines the input
# and control scheme of the robot,
# Arranged into operating "modes"
mode_a:
# Mode A is a driver-centric control mode
driver:
controller_port: 0 # What usb port the driver controller is on
# Driving
forward_axis: 1 # "Forward" Axis
steer_axis: 4 # "Steering" Axis
strafe_axis: 0 # "Strafe" Axis
# Functions
rezero_swerve: 8 # Updated week1 by Joe
operator:
controller_port: 1 # What usb port the operator controller is on
# Functions
kicker_button: 6 # Updated week1 by Joe
catapult_button: 1 # Updated week1 by Joe
intake_button: 5 # Updated week1 by Joe
assisted_shooter_button: 4 # Updated week1 by Joe
high_catapult_button: 3 # Updated week1 by Joe
climb_axis: 1
climb_up: 0
climb_down: 1
climb_active: 7
sim:
# The control mappings for use when using the simulator
controller_port: 0 # What usb port the driver controller is on
# Driving
forward_axis: 1 # "Forward" Axis
steer_axis: 2 # "Steering" Axis
strafe_axis: 0 # "Strafe" Axis
# Functions
kicker_button: 4
catapult_button: 3
intake_button: 3
assisted_shooter_button: 3
high_catapult_button: 2
rezero_swerve: 1
climb_axis: 1
climb_up: 0
climb_down: 1
climb_active: 7
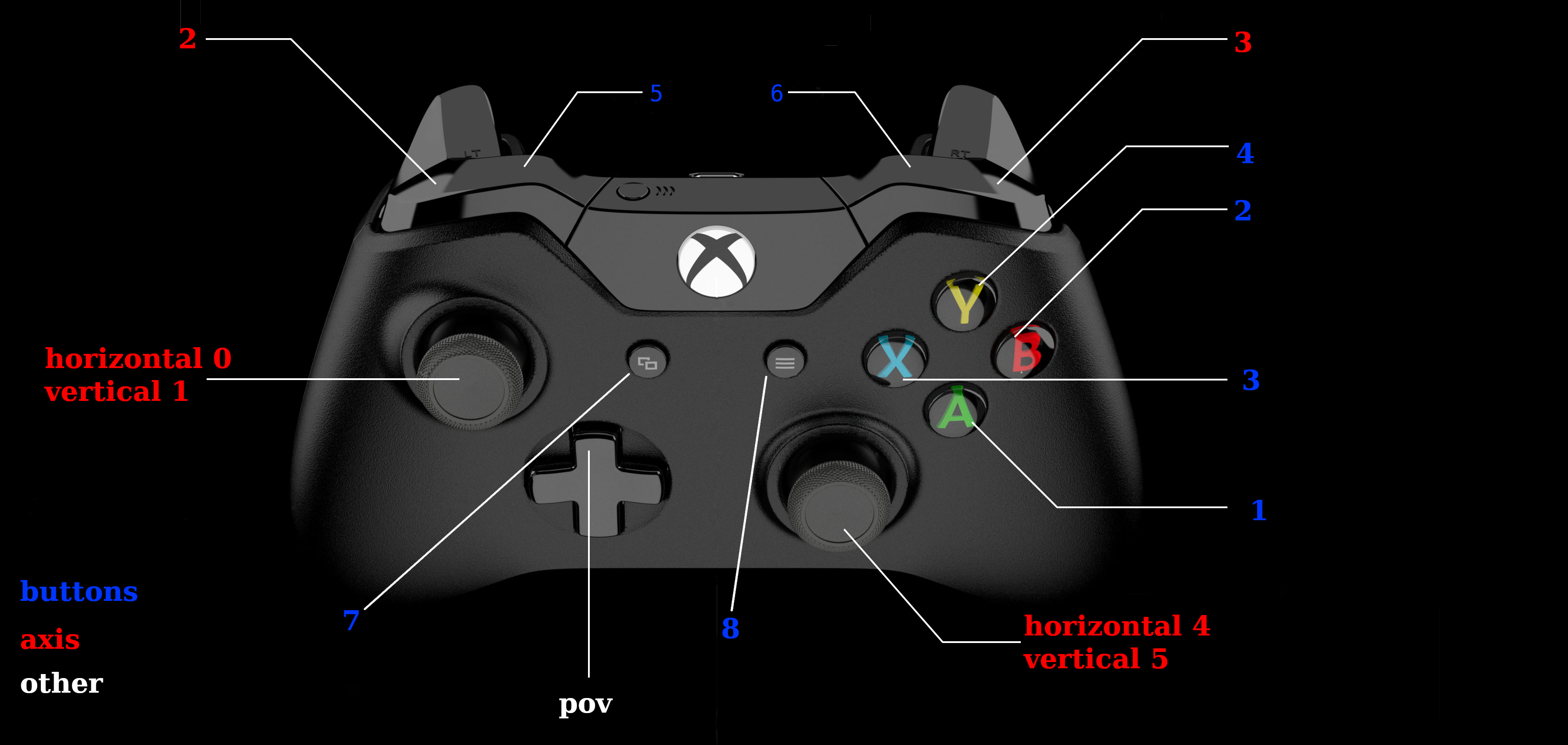
While the most of the image is self explanitory or common knowledge I.E. the joysticks being able to go from 1 on the right and -1 on the left.
The triggers are only able to go from 0 to 1, and the LB and RB are buttons, with the blue logitech controller the pov and left joystick are switched.

The standard controller that we use the logitech joystick, most should have knowledge on how this works.
This controller have being used the most in previous years, it might no be used as much in previous years.